Bionic NXTPod 3.0 was a flexible robot arm inspired by Festo’s Bionic Tripod 3.0. It featured four custom linear actuators that pushed four independent flexible rods up and down, making the arm able to tilt in any direction fairly quickly. A fifth motor served two functions. Controlled purely mechanically using a differential, it was able to both pump air into the pneumatics and flip the switch to open and close the top gripper.
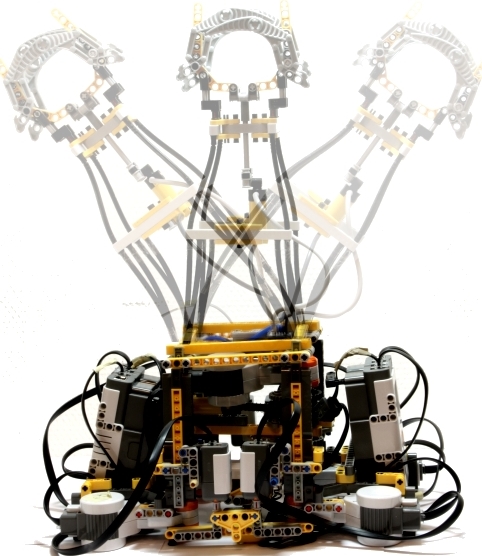
Bionic NXTPod 3.0, overlaid with different arm positions.
With its five motors, Bionic NXTPod 3.0 could not be controlled by a single NXT intelligent brick, which inherently only supports three motors; not being very good at BlueTooth programming back then, I had the two communicate using a light and a light sensor.
The master, on the left, would turn the height the slave’s actuators needed to go to into binary using a simple conversion function. It would then “send” this message, at ten bits per second, to the slave, which would decode it and move its motors accordingly.
There's also a YouTube video of it in action: